ResNet을 Pytorch를 활용하여 구현하고자 한다.
https://arsetstudium.tistory.com/45에서 공부한 내용을 토대로 구현보면 아래와 같다.
ResNet 구조는 여러가지인데 18, 34, 50, 101, 152 layers다.
VGGNet처럼 ResNet도 블록 단위로 구분할 수 있다.
블록단위로 구현하고 또 다양한 수의 레이어를 적용할 수 있도록 작성하고자 한다.
우선 Block을 만들기 위한 Sub-block 코드다.
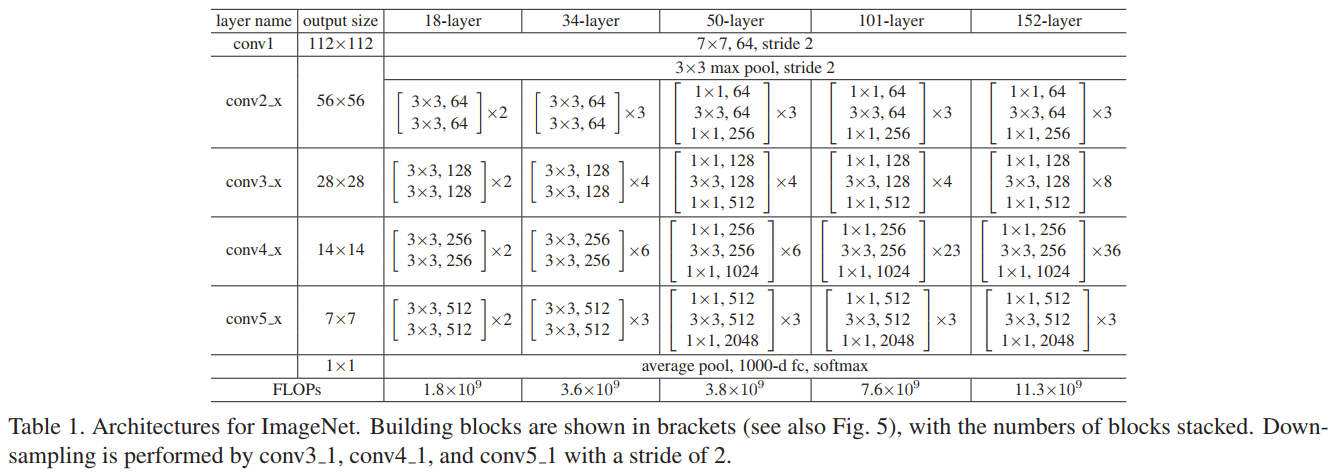
Table 1에서 conv2 block에서 개별 conv2_x를 만드는 코드다.
# Sub-block for 18, 34 layers
class ResNetTwoSubBlock(nn.Module):
def __init__(self, in_features, out_features, start=False):
super().__init__()
if start == False:
self.conv_sub_block = nn.Sequential(
nn.Conv2d(in_features, out_features, kernel_size = 3, padding = 1),
nn.ReLU(),
nn.Conv2d(out_features, out_features, kernel_size = 3, padding = 1),
nn.ReLU()
)
else:
self.conv_sub_block = nn.Sequential(
nn.Conv2d(in_features, out_features, kernel_size = 3, stride = 2, padding = 1),
nn.ReLU(),
nn.Conv2d(out_features, out_features, kernel_size = 3, padding = 1),
nn.ReLU()
)
def forward(self, x):
y = self.conv_sub_block(x)
return y
# Sub-block for 50, 101, 152 layers
class ResNetThreeSubBlock(nn.Module):
def __init__(self, in_features, mid_features, out_features, start=False):
super().__init__()
if start == False:
self.conv_sub_block = nn.Sequential(
nn.Conv2d(in_features, mid_features, kernel_size = 1, padding = 0),
nn.ReLU(),
nn.Conv2d(mid_features, mid_features, kernel_size = 3, padding = 1),
nn.ReLU(),
nn.Conv2d(mid_features, out_features, kernel_size = 1, padding = 0),
nn.ReLU()
)
else:
self.conv_sub_block = nn.Sequential(
nn.Conv2d(in_features, mid_features, kernel_size = 1, stride = 2, padding = 0),
nn.ReLU(),
nn.Conv2d(mid_features, mid_features, kernel_size = 3, padding = 1),
nn.ReLU(),
nn.Conv2d(mid_features, out_features, kernel_size = 1, padding = 0),
nn.ReLU()
)
def forward(self, x):
y = self.conv_sub_block(x)
return y
위 sub-block을 이용해서 전체 layers를 만드는 코드다.
class ResNet(nn.Module):
def __init__(self, in_features, out_features, num_layers = 34):
super().__init__()
self.num_layers = num_layers
# First Conv Block
# 찍어 보니까 output size 112를 맞추려면 padding이 3이다.
self.conv1 = nn.Sequential(
nn.Conv2d(in_features, 64, kernel_size = 7, stride = 2, padding = 3),
nn.ReLU()
)
# padding size 1
self.max_pool = nn.MaxPool2d(kernel_size = 3, stride = 2, padding=1)
if self.num_layers == 18:
num_loops = [2, 2, 2, 2]
elif self.num_layers in (34, 50):
num_loops = [3, 4, 6, 3]
elif self.num_layers == 101:
num_loops = [3, 4, 23, 3]
elif self.num_layers == 152:
num_loops = [3, 8, 36, 3]
# 18 or 34-layers 구조인 경우
if self.num_layers in (18, 34):
self.conv2_block = self.build_blocks_two(num_loops[0], 64, 64, start=False)
self.conv3_block = self.build_blocks_two(num_loops[1], 64, 128)
self.conv4_block = self.build_blocks_two(num_loops[2], 128, 256)
self.conv5_block = self.build_blocks_two(num_loops[3], 256, 512)
# Transform Layers to connect Residual Connections
self.connect3 = nn.Conv2d(64, 128, kernel_size = 1, stride = 2)
self.connect4 = nn.Conv2d(128, 256, kernel_size = 1, stride = 2)
self.connect5 = nn.Conv2d(256, 512, kernel_size = 1, stride = 2)
# 50 or 101 or 152-layers 구조인 경우
else:
self.conv2_block = self.build_blocks_three(num_loops[0], 64, 64, 256, start=False)
self.conv3_block = self.build_blocks_three(num_loops[1], 256, 128, 512)
self.conv4_block = self.build_blocks_three(num_loops[2], 512, 256, 1024)
self.conv5_block = self.build_blocks_three(num_loops[3], 1024, 512, 2048)
# Transform Layers to connect Residual Connections
self.connect3 = nn.Conv2d(256, 512, kernel_size = 1, stride = 2)
self.connect4 = nn.Conv2d(512, 1024, kernel_size = 1, stride = 2)
self.connect5 = nn.Conv2d(1024, 2048, kernel_size = 1, stride = 2)
# conv2,3,4,5 blocks를 만드는 코드
def build_blocks_two(self, iter_loops, in_channels, out_channels, start=True):
block_list = [ResNetTwoSubBlock(in_channels, out_channels, start=start)]
for i in range(iter_loops-1):
block_list.append(ResNetTwoSubBlock(out_channels, out_channels))
block_list = nn.ModuleList(block_list)
return block_list
def build_blocks_three(self, iter_loops, in_channels, mid_channels, out_channels, start=True):
block_list = [ResNetThreeSubBlock(in_channels, mid_channels, out_channels, start=start)]
for i in range(iter_loops-1):
block_list.append(ResNetThreeSubBlock(out_channels, mid_channels, out_channels))
block_list = nn.ModuleList(block_list)
return block_list
def forward(self, x):
if self.num_layers in (18, 34):
y = self.conv1(x)
y = self.max_pool(y)
# Conv 2 Block
for conv in self.conv2_block:
y = conv(y) + y
# Conv 3 Block
for conv in self.conv3_block:
y = conv(y) + y
# Conv 4 Block
for conv in self.conv4_block:
y = conv(y) + y
# Conv 5 Block
for conv in self.conv5_block:
y = conv(y) + y
return y
중간에 shortcut connection에서 linear transformation으로 시도하려다가 실패하고 torchvision으로 구현된 코드를 참고했다.
그래서 1x1 convolution self.connect 코드로 이미지 사이즈는 보존하되 채널의 수만 변경하려고 시도했다.
18이나 34 레이어 ResNet은 맨 처음 stride 2인 convk_1 layer와만 채널 수를 맞추면 residual connection (= shortcut connection)이 작동한다.
하지만 50이상의 레이어 구조의 경우 stirde 2가 아닌 경우에도 채널 수가 계속 layer input의 채널 수와 계속해서 달라진다.
따라서 ResNet 클래스 내에서 self.connect를 생성하는 것 보다는 sub-block에 만들고, 필요할 때 마다 쓰는게 더 낫다.
torchvision에서 왜 BasicBlock 클래스 내에 self.identity 혹은 self.downsample의 형식으로 만들어서 residual connection에 사용하는지를 이해할 수 있었다.
큰 접근은 틀리지 않았지만 주요 부분들을 모두 torchvision을 참고했기에 별도의 구현은 여기서 멈추고 일종의 모범 답안인 torchvision의 ResNet class를 아래에서 살펴보고 마무리하겠다.
# Conv2, 3, 4, 5 Blocks를 만드는 sub-block
class BasicBlock(nn.Module):
expansion: int = 1
def __init__(
self,
inplanes: int,
planes: int,
stride: int = 1,
downsample: Optional[nn.Module] = None,
groups: int = 1,
base_width: int = 64,
dilation: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None,
) -> None:
super().__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError("BasicBlock only supports groups=1 and base_width=64")
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x: Tensor) -> Tensor:
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
# 원래의 ResNet과 다르게 conv2가 아닌 conv1에 stride를 설정
class Bottleneck(nn.Module):
# Bottleneck in torchvision places the stride for downsampling at 3x3 convolution(self.conv2)
# while original implementation places the stride at the first 1x1 convolution(self.conv1)
# according to "Deep residual learning for image recognition" https://arxiv.org/abs/1512.03385.
# This variant is also known as ResNet V1.5 and improves accuracy according to
# https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch.
expansion: int = 4
def __init__(
self,
inplanes: int,
planes: int,
stride: int = 1,
downsample: Optional[nn.Module] = None,
groups: int = 1,
base_width: int = 64,
dilation: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None,
) -> None:
super().__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.0)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x: Tensor) -> Tensor:
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(
self,
block: Type[Union[BasicBlock, Bottleneck]],
layers: List[int],
num_classes: int = 1000,
zero_init_residual: bool = False,
groups: int = 1,
width_per_group: int = 64,
replace_stride_with_dilation: Optional[List[bool]] = None,
norm_layer: Optional[Callable[..., nn.Module]] = None,
) -> None:
super().__init__()
_log_api_usage_once(self)
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.inplanes = 64
self.dilation = 1
if replace_stride_with_dilation is None:
# each element in the tuple indicates if we should replace
# the 2x2 stride with a dilated convolution instead
replace_stride_with_dilation = [False, False, False]
if len(replace_stride_with_dilation) != 3:
raise ValueError(
"replace_stride_with_dilation should be None "
f"or a 3-element tuple, got {replace_stride_with_dilation}"
)
self.groups = groups
self.base_width = width_per_group
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, dilate=replace_stride_with_dilation[0])
self.layer3 = self._make_layer(block, 256, layers[2], stride=2, dilate=replace_stride_with_dilation[1])
self.layer4 = self._make_layer(block, 512, layers[3], stride=2, dilate=replace_stride_with_dilation[2])
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu")
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
# Zero-initialize the last BN in each residual branch,
# so that the residual branch starts with zeros, and each residual block behaves like an identity.
# This improves the model by 0.2~0.3% according to https://arxiv.org/abs/1706.02677
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck) and m.bn3.weight is not None:
nn.init.constant_(m.bn3.weight, 0) # type: ignore[arg-type]
elif isinstance(m, BasicBlock) and m.bn2.weight is not None:
nn.init.constant_(m.bn2.weight, 0) # type: ignore[arg-type]
# Sub-blocks = BasicBlock을 이용해서 Convk Block을 생성
def _make_layer(
self,
# 오리지널 ResNet대로 갈지, Bottleneck으로 갈지 결정
block: Type[Union[BasicBlock, Bottleneck]],
planes: int,
blocks: int,
stride: int = 1,
dilate: bool = False,
) -> nn.Sequential:
norm_layer = self._norm_layer
downsample = None
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
norm_layer(planes * block.expansion),
)
layers = []
# 논문에서 표기한대로 맨 처음에 stirde 2와
# residual connection을 위한 downsample 추가
layers.append(
block(
self.inplanes, planes, stride, downsample, self.groups, self.base_width, previous_dilation, norm_layer
)
)
# stride 1이고 downsample이 없다
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(
block(
self.inplanes,
planes,
groups=self.groups,
base_width=self.base_width,
dilation=self.dilation,
norm_layer=norm_layer,
)
)
return nn.Sequential(*layers)
def _forward_impl(self, x: Tensor) -> Tensor:
# See note [TorchScript super()]
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
# Conv 2, 3, 4, 5 Block을 생성
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
# Classificaiton Layers
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def forward(self, x: Tensor) -> Tensor:
return self._forward_impl(x)
References:
https://github.com/pytorch/vision/blob/main/torchvision/models/resnet.py#L59
'Computer Vision' 카테고리의 다른 글
| Faster R-CNN (2016) 논문 리뷰 (0) | 2024.04.27 |
|---|---|
| ResNet (2016) 논문 리뷰 (0) | 2024.04.15 |
| Fast R-CNN (2015) 논문 리뷰 (0) | 2024.04.14 |
| Show and Tell = Neural Image Caption (NIC) (2014) 모델 간단 리뷰 (0) | 2024.04.13 |
| SPPNet(2014) PyTorch Implementation (0) | 2024.04.12 |



